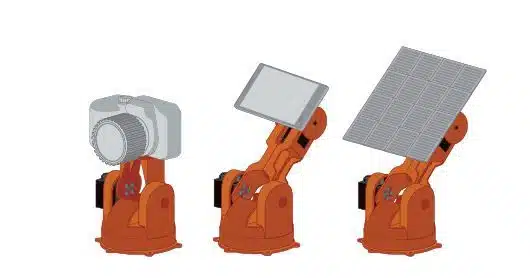
El brazo robótico Braccio puede ensamblarse en una gran variedad de formas, debido a que está diseñado para ser versátil, el Braccio incluso puede soportar varios objetos en el órgano terminal.
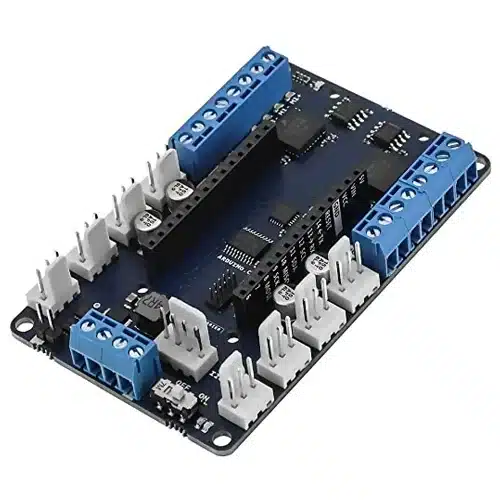
El Braccio incluye un shield que le permite conectar los servos directamente a su placa Arduino.
NOTA: Este kit no incluye el Arduino
ESPECIFICACIONES TÉCNICAS
Alimentación:
Se recomienda alimentar la placa a través del conector jack con una fuente de alimentación regulada de 5 VDC @ 5000 mA incluida en la caja.
Hay un regulador de voltaje que protege el shield Braccio de voltajes más altos. NOTA: La protección no funciona para Arduino Yun si pones el puente entre Vin y 5V en el Arm Robot Shield V1.
Características físicas:
- Piezas de plástico x 21
- Tornillos x 63
- Golilla plana x 16
- Tuerca hexagonal x 7
- Resortes x 2
- Servomotores: 2 x SR 311, 4 x SR 431
- Shield Arduino compatible x 1
- Fuente de alimentación 5V, 5A x 1
- Destornillador Phillips x 1
- Llave hexagonal doble x 1
- Protector de cable en espiral x 1
Características del Kit Braccio ensamblado:
- Peso: 792 g
- Rango de distancia máxima de operación: 80 cm
- Altura máxima: 52 cm
- Ancho de la base: 14 cm
- Ancho del gripper: 90 mm
- Longitud del cable: 40 cm
- Capacidades de carga:
- Carga máxima a una distancia de operación de 32 cm: 150 g
- Carga máxima con la configuración mínima del Braccio: 400 g
Braccio Shield: la longitud y el ancho máximos de Braccio Shield PCB son de 2.7 y 2.1 pulgadas respectivamente, con el conector de alimentación extendiéndose más allá de la dimensión anterior. Cuatro orificios para tornillos permiten que la placa se una a una superficie o caja. Tenga en cuenta que la distancia entre los pines digitales 7 y 8 es de 160mm, no es un múltiplo par del espaciado de 100 mm de los otros pines.
Especificaciones técnicas de los servo:
SpringRC SR431 – Servo de salida dual
- Señal de control: Analógico PWM
- Torque:
- @ 4.8V: 169.5 oz-in (12.2 kg-cm)
- @ 6.0V: 201.4 oz-in (14.5 kg-cm)
- Peso: 2.19 oz (62.0 g)
- Dimensiones: 1.65 × 0.81 × 1.56 in (42.0 × 20.5 × 39.5 mm)
- Velocidad:
- @ 4.8V: 0.20 seg / 60 °
- @ 6.0V: 0.18 seg / 60 °
- Soporte de rotación: rodamientos dobles
- Material del engranaje: Metal
- Rango de rotación: 180 °
- Tipo de conector: J (también conocido como Futaba)
SpringRC SR311
- Señal de control: Analógico PWM
- Torque:
- @ 4.8V: 43.13 oz-in (3.1 kg-cm)
- @ 6.0V: 52.86 oz-in (3.8 kg-cm)
- Peso: 0.95 oz (27.0 g)
- Dimensiones: 1.23 × 0.65 × 1.13 in (31.3 × 16.5 × 28.6 mm)
- Velocidad:
- @ 4.8V: 0.14 seg / 60 °
- @ 6.0V: 0.12 seg / 60 °
- Soporte de rotación: rodamientos dobles
- Material del engranaje: Metal
- Rango de rotación: 180 °
- Tipo de conector: J (también conocido como Futaba)
Documentos:
- Te recomendamos revisar el siguiente artículo


.