Este módulo suele ser programado mediante la board Arduino, proporciona una solución asequible a cualquier proyecto robótico que necesite una palanca Joystick. Dispone de dos entradas analógicas, de las cuales el robot tiene a su disposición el control de los ejes X, Y. Así mismo se encuentra un interruptor que está conectado a un pin digital. La palanca de mando posee una resistencia en ambas direcciones, en donde esta varía según el mando de direccionamiento del Joystick. Tiene integrado un indicador de energía que exhibe el estado de trabajo, el identificador de coordenadas es claro, con un conciso posicionamiento, preciso, permitiendo un control sencillo de los objetos en marcha un espacio bidimensional.
Características:
– Interfaz: Analógico
– Voltaje de entrada: 5V (2.5V lectura)
– Pin estándar: 2.54mm
– Resistencia de palanca de cruz: 10KOhms
– Pines analógicos de salida: 2
– Pines digitales de salida: 1 (compensación (X, Y) eje, que tipo analógico; botón indica si el usuario pulsa el eje Z, el tipo es cambio digital)
– Tres ejes: (X, Y, Z (botón))
– Tamaño: 3.7cm x 2.5cm x 3.2cm
– Peso: 15 gramos
El circuito para Arduino es tan simple como esto:
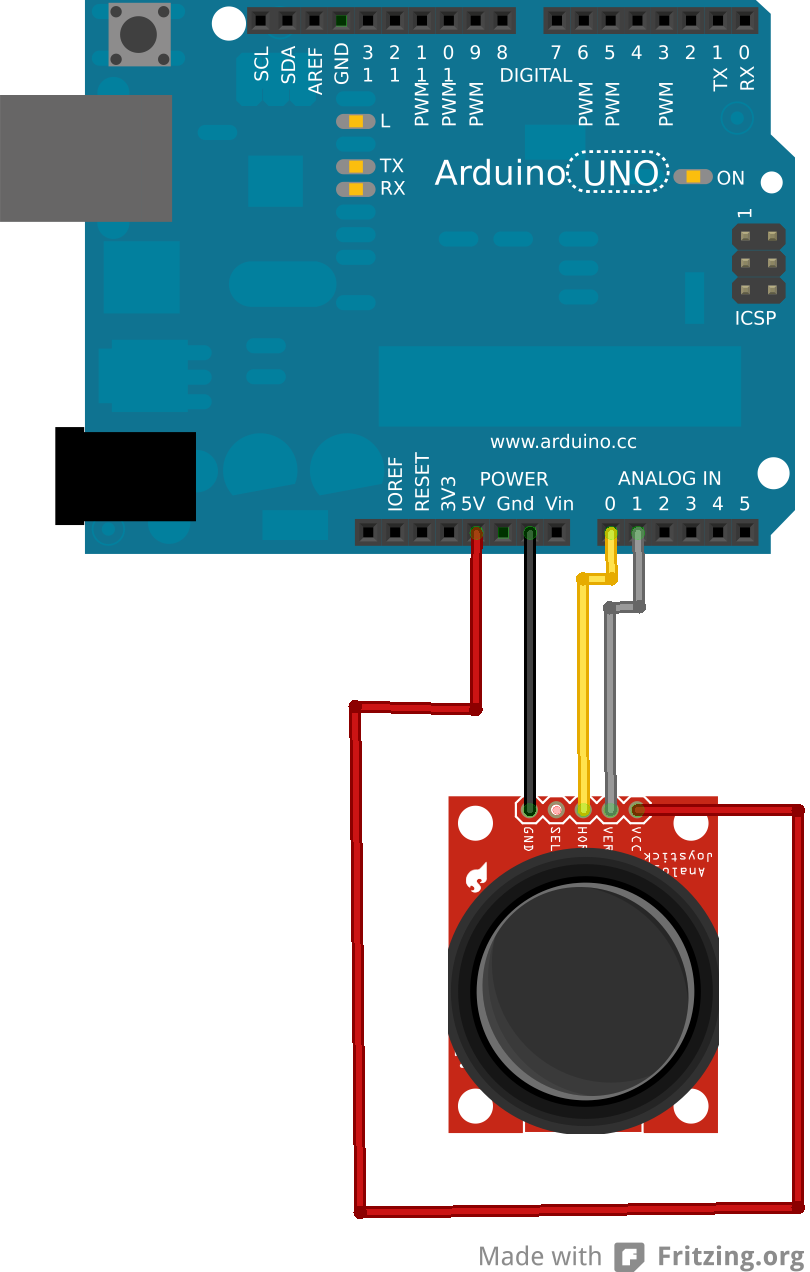

Ahora solamente necesitamos un programa capaz de leer estas entradas y en este caso mostrar su valor en nuestra consola Serial:
- //Definimos los pines en los que tenemos conectadas las salidas del joystick
- const int ejeH = 0;
- const int ejeV = 1;
- void setup() {
- // Inicializamos la comunicación serial
- Serial.begin(9600);
- }
- void loop(){
- //Mostramos las lecturas por la consola
- Serial.print(«EjeX: «)
- Serial.print(analogRead(ejeH));
- Serial.print («EjeY: «);
- Serial.print(analogRead(ejeV));
- }
Ahora que sabemos leer un joystic podemos usarlo para lo que queramos. Cómo por ejemplo, controlar un servo.